
Модернизация системы управления мостовым краном включает в себя:
Система управления мостовым краном стандартно реализует следующие функции:
Структура системы управления мостовым краном, реализуемая ДЭП «Ракурс», представлена на рисунке 1.
Центральным устройством в системе является программируемый логический контроллер (ПЛК), в котором реализуются алгоритмы и логика работы мостового крана. Сигналы управления от органов управления кресла-пульта оператора и концевых выключателей собираются при помощи модулей распределенного ввода/вывода ПЛК. Связь преобразователей частоты с ПЛК осуществляется по промышленной сети (Modbus, Profibus, CANopen и др.) или посредством дискретных и аналоговых сигналов.
ПЛК собирает сигналы, поступающие от органов управления кресла-пульта оператора и концевых выключателей, обрабатывает согласно заложенным в него алгоритмам, и выдает управляющие сигналы на преобразователи частоты, питающие электродвигатели механизмов крана. При этом могут быть реализованы такие интеллектуальные функции управления, как предотвращение раскачивания груза, устранение перекоса при движении моста, позиционирование груза с использованием координатной сетки, регистрация событий (действий оператора крана, поступления сигналов) и другие. Применение ПЛК также предоставляет широкие возможности для интеграции системы управления мостовым краном в системы автоматизации верхнего уровня.
По желанию Заказчика может быть изменена структура системы управления с целью исключению из нее ПЛК, в этом случае сигналы управления будут поступать от органов управления и концевых выключателей непосредственно на преобразователи частоты. Такой вариант позволяет снизить стоимость системы, однако интеллектуальные функции управления при этом не могут быть реализованы.
В качестве управляющих контроллеров в системах управления мостовыми кранами с ЧРП применяет ПЛК фирм Omron, Siemens, Schneider Electric, однако по требованию Заказчика могут быть использованы управляющие контроллеры и других производителей.
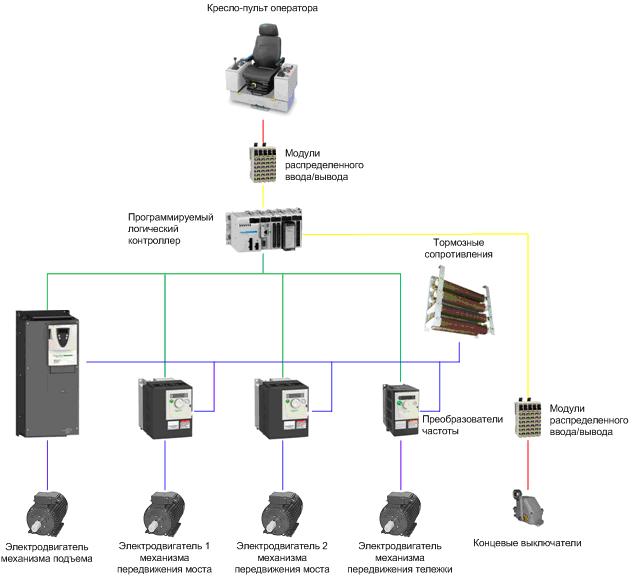
Рисунок 1. Структура системы управления мостовым краном.
В качестве преобразователей частоты, в зависимости от пожеланий Заказчика, могут быть использованы преобразователи частоты таких фирм как Schneider Electric, Control Techniques, Siemens, Danfoss, Omron, Mitsubishi, ABB, Vacon, Hyundai и другие.
Энергия, возникающая в процессе торможения механизмов крана, рассеивается на тормозных сопротивлениях. Возможен также вариант с рекуперацией тормозной энергии в сеть предприятия, или распределения между механизмами крана, при объединении преобразователей частоты по звену постоянного тока.
Управление мостовым краном осуществляется при помощи органов управления (джойстики, кнопки, переключатели) кресла-пульта, размещаемого в кабине оператора. По желанию Заказчика может быть реализована функция радиоуправления. В целях мониторинга состояния механизмов крана, срабатывания концевых выключателей, высоты подъема груза и отображения другой информации, дополнительно может быть установлена графическая панель оператора.
ООО «НПФ «Ракурс» использует графические панели оператора фирм Omron, Siemens, Schneider Electric, однако по требованию Заказчика может использоваться графическая панель и других производителей.
В качестве аппаратуры управления и светосигнальной арматуры (лампы, ключи, кнопки и пр.), а также коммутационной аппаратуры (контакторы, автоматические выключатели) используется продукция фирмы Schneider Electric или ABB.
В результате внедрения системы управления краном на базе частотно-регулируемого электропривода достигается:
Система управления на базе частотно-регулируемого электропривода по сравнению с традиционным вариантом системы управления имеет следующие преимущества:

